Project Portfolio
Recent projects I have designed and managed.
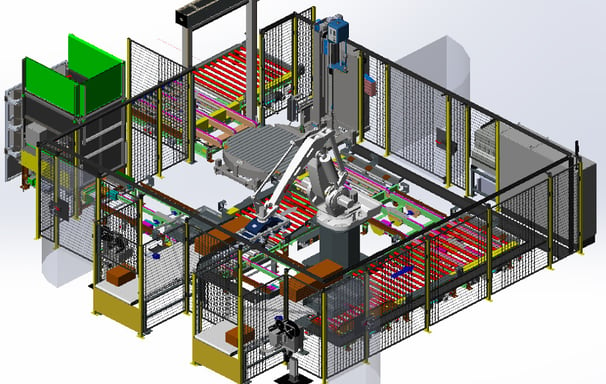
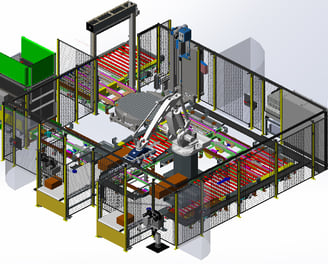
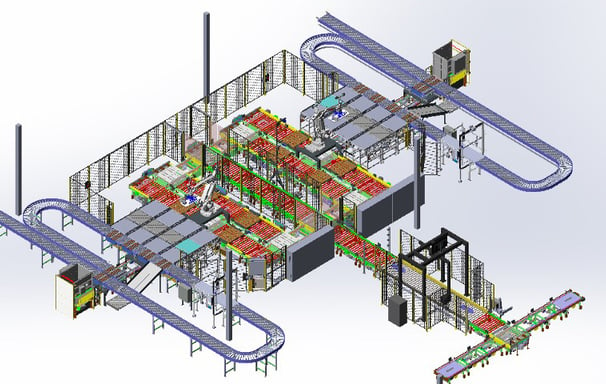
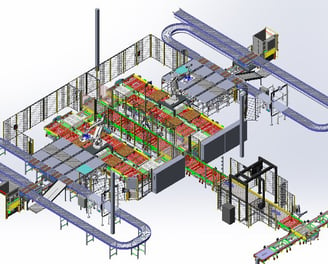
Sorting & Palletizing
Lead Design Engineer | Production Manager | Installation and Commissioning Supervisor
The aim of this project was to streamline the sorting and palletizing processes for both packaged and bulk cleaning wipes. When processing packaged products, the system dynamically reorients cases to align with the designated pallet patterns. This task is managed by two Motoman GP8 robots equipped with belt tracking. Upon completing the desired pallet layout, a Motoman MPL500 transfers the entire layer onto a pallet.
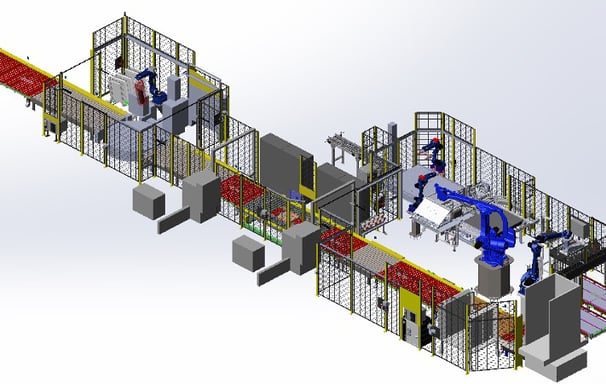
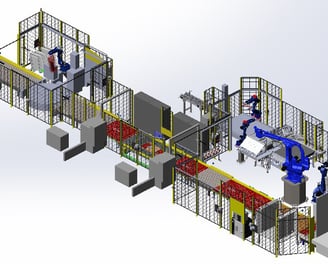
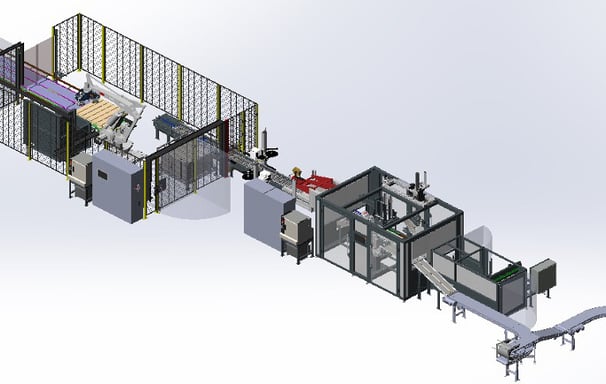
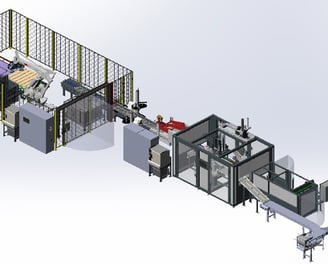
Packing & Palletizing
Support Design Engineer | Production Support | Installation and Commissioning Supervisor
The objective of this project was to package various sizes of pretzel bags into boxes for subsequent palletization. The system comprised two distinct legs: one for handling larger-sized bags, whether packed horizontally or vertically, and another for smaller bag sizes with high throughput capability.


Box Identification & Palletization
Lead Design Engineer | Production Manager | Installation and Commissioning Supervisor
This system is engineered to size and palletize any boxes within specified limits. Boxes of various dimensions enter the system via the MDR loop, proceeding through an imaging tunnel where their width, length, and height are precisely measured. Based on these measurements, our software generates the most efficient pallet pattern and assigns each box to an appropriate lane. Each lane accumulates boxes until there is 48 inches or less of product, at which point the ABB IRB 660 robot systematically picks up the products and places them onto the designated pallet. The system can manage four different box sizes simultaneously per side and resets once a build station becomes available. Completed pallets are then transported through the system to a mast stretch wrapper and subsequently to one of the unloading conveyors.
Case Packing & Palletizing
Lead Design Engineer | Production Manager
This system is engineered to vertically pack and palletize grout bags of various sizes. Due to the specific case sizes required, we developed and implemented a custom case erector. Grout bags are dispensed onto a conveyor, where they are flipped for proper orientation. The bags are then fed into a case packing cell, where an ABB IRB2600 robot loads them into a staging bin. Once the requisite number of bags are stacked in the staging bin, an electric actuator pushes the product into a clamping mechanism on a gantry. This mechanism clamps the product to prevent it from falling out, rotates it 90 degrees, and then releases the product into the box. The boxes are subsequently transferred out of the cell, sealed, labeled, and palletized.
2-In, 1-Out Palletizing
Lead Design Engineer
This palletizer system is designed to accommodate space constraints while efficiently managing the flow of boxes. The system includes two infeed conveyors, each feeding boxes into the compact palletizing cell. Boxes are rotated 90 degrees using a bump turn mechanism and collated into groups of 3 or 4, depending on the required pallet pattern. Once a pallet is fully assembled, it is automatically transferred to a stretch wrapper. After wrapping, the pallet is moved out of the system to one of two pick stations for final handling and distribution.